
マトリクス変位法(トラス)【3/3】
この記事の要点
マトリクス変位法(トラス編 3/3)では、求めた変位ベクトルから各部材の軸力・反力を逆算する後処理の手順を解説する。
部材ごとに{f}=[K]{u}を適用し、部材座標系に変換した変位から軸力を求める。計算結果の検証(全体の力の釣り合い)も行う。
【管理人おすすめ!】セットで3割もお得!約1,100語の用語集+476点の図解集セット⇒ 建築構造がわかる基礎用語集&図解集セット
この章で、いよいよマトリクス変位法編は完結です。まだ読んでいない人は、『部材力と材端力の違い』、『マトリクス変位法(トラス):剛性マトリクスの組み立てと解法』、『マトリクス変位法(トラス)【2/3】』からどうぞ。
100円から読める!ネット不要!印刷しても読みやすいPDF記事はこちら⇒ いつでもどこでも読める!広告無し!建築学生が学ぶ構造力学のPDF版の学習記事
全体座標系のKマトリクス
部材座標系による剛性マトリクスを求めたら、それを全体座標系になおす必要があります。その図を示したものが以下となります。
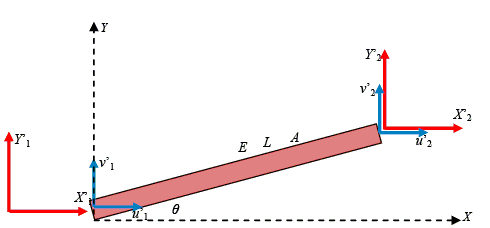
座標変換に関しては、弾性力学の章で深く説明していますので、そちらを確認してください。結果として、z軸まわりの座標変換マトリクスは、以下のように示されます。
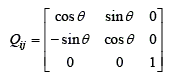
この問題は平面で取り扱っているので、
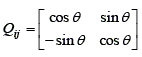
となります。
以上より、部材座標系と全体座標系の関係を式にすると、外力および変位は
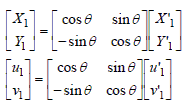
となりますね。以上の関係は節点2についても同様に成り立つので、纏めると
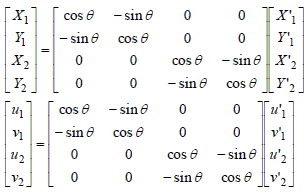
となります。以上が、部材座標系での外力及び変位と全体座標系での外力及び変位の関係です。上式を簡略化して書くと、

Qが座標変換マトリクスです。よって、全体座標系での外力及び変位は、
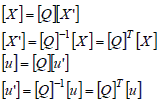
となります。「-1」が上添え字で付いているのは、逆行列で、「T」は転置行列という意味ですね。以上より、全体座標系の剛性マトリクスを計算すると、
![]()
ですから、
![]()
となります。実際に、このマトリクスの中身を計算してみると(ここでは省略しますよ…)、
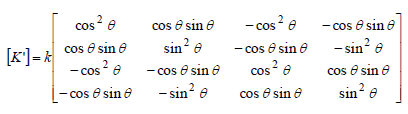
となりました。
混同しやすい用語
部材軸力の算定
求めた節点変位{u}を部材座標系に変換し、部材剛性マトリクスを掛けて部材端力(軸力)を求める。
全体座標から部材座標への変換([T]{u})が必要。
支点反力の算定
全体剛性方程式[K]{u}={f}に求めた{u}を代入し、境界条件で省いていた行を含めて計算することで支点反力を求める。
引張軸力(正値)
部材を引き伸ばす方向の軸力。
マトリクス変位法では符号規則を統一して計算する必要があり、正の値が引張を意味することが多い。
圧縮軸力(負値)
部材を縮める方向の軸力。
負の値で表されることが多い。
計算後の符号を確認して引張・圧縮を判断する。
マトリクス変位法 後処理の手順 比較表
| 後処理ステップ | 内容 | 注意点 |
|---|---|---|
| 1. 節点変位の取得 | [K']{u'}={f'}を解いて未知節点変位を求める | 境界条件処理後の縮小系を用いる |
| 2. 全体→部材座標系変換 | [T]{u}で全体座標系の変位を部材座標系に変換 | 傾いた部材は変換マトリクス[T]が必要 |
| 3. 部材端力の計算 | [k]([T]{u})で部材端力(軸力・せん断力)を求める | 符号規則を事前に統一しておく |
| 4. 支点反力の計算 | 全体剛性方程式に{u}を代入して固定支点の力を求める | 境界条件で省いた行を使って計算 |
| 5. 検証(釣り合い確認) | 全節点での力の釣り合いを確認 | ΣF=0が成立すれば計算正確 |
手計算法 vs マトリクス変位法 比較表
| 比較項目 | 手計算法(たわみ角法等) | マトリクス変位法 |
|---|---|---|
| 適用範囲 | 比較的単純な構造 | 複雑な多節点・多部材構造 |
| 計算手順 | 構造ごとに方程式を立てる | 体系的なマトリクス操作 |
| コンピュータ適合性 | 低い | 高い(FEMの基礎) |
| 誤りの検出 | 難しい(手順依存) | 釣り合い検証が可能 |
よくある誤解
- ×誤り「節点変位を求めれば後処理は不要」→ ○正解 構造設計では変位だけでなく部材軸力や支点反力が必要。後処理(部材端力・反力の計算)まで行って初めて解析完了
- ×誤り「マトリクス変位法では符号規則は何でもよい」→ ○正解 符号規則(引張正/圧縮負など)は最初に統一して一貫させる必要がある。途中で変えると結果が誤りになる
- ×誤り「全体釣り合いの検証は省略してよい」→ ○正解 計算結果の検証は必須。ΣF=0が成立しない場合は計算ミスやモデル化の誤りがある
一問一答
Q. マトリクス変位法で後処理として「支点反力の計算」を行う方法は?
A. 全体剛性方程式[K]{u}={f}に求めた全節点変位{u}(支点変位=0を含む)を代入する。境界条件処理で省いた支点に対応する行から支点反力が得られる
Q. 「全体釣り合いの検証」とはどういう操作か?
A. 求めた支点反力と外力を全構造系に適用してΣFx=0、ΣFy=0、ΣM=0が成立するか確認する。成立すれば計算が正しい
【管理人おすすめ!】セットで3割もお得!約1,100語の用語集+476点の図解集セット⇒ 建築構造がわかる基礎用語集&図解集セット
理解度チェック
マトリクス変位法(トラス3/3)の後処理では何を求める?
求めた変位ベクトルから各部材の軸力・反力を逆算します。
軸力の逆算に使う式は?
部材ごとに{f}=[K]{u}を適用し、部材座標系に変換した変位から求めます。

▼用語の意味知らなくて大丈夫?▼
▼同じカテゴリの記事一覧▼
- 静定構造物と不静定構造物の違いと特徴
- 外力の仕事について
- 最小仕事の定理とは?意味・カスチリアーノの第2定理との関係と不静定梁への適用
- 仮想仕事の原理とは|不静定梁・不静定トラスへの適用方法を解説
- 仮想仕事とは?1分でわかる意味、たわみ、構造力学、仮想仕事の原理との関係
- 不静定連続梁の解法|仮想仕事の原理を使った計算手順をわかりやすく解説
- CMQの算定
- たわみ角法[1/3]
- 固定モーメント法-その1-
- 固定モーメント法-その2-
- 不静定梁を固定モーメント法で解く方法|手順と計算例をわかりやすく解説
- 材端力と部材力とは?定義・記号の違いと剛性方程式への応用(マトリックス解析)
- マトリクス変位法(トラス):剛性マトリクスの組み立てと解法
- マトリクス変位法(トラス)【2/3】
▼カテゴリ一覧▼
▼他の勉強がしたい方はこちら▼
わかる1級建築士の計算問題解説書
わかる2級建築士の計算問題解説書!
【30%OFF】一級建築士対策も◎!構造がわかるお得な用語集
プロフィール
- 略歴▼
- 名前 ハナダユキヒロ/ミツメラボ代表.
- 2010年 弊サイトを開設
- 2010~2017年 国立大学大学院修了
- 2017年12月に当HPが書籍化。
- 「わかる構造力学」
- 2022年4月に「わかる構造力学」の改訂版出版。
- 「わかる構造力学(改訂版)」
- 10数年以上、建築の学問、研究、構造設計の実務に携わった経験を元に、未経験の方、建築関係の学生、社会人の方に向けて
- 「構造力学、構造計算、鋼構造、鉄筋コンクリート造、基礎構造、土質力学、水理学、材料力学、数学の基礎」を分かりやすくお伝えします。
- 当サイトの目的▼
- 建築学生が学ぶ「構造力学」の目的
- とりあえず10記事▼
- 初めましての方に10記事用意しました
- おすすめ書籍紹介▼
- 構造力学・建築構造のおすすめ本|現役設計者が読んで良かった書籍を紹介
建築の本、紹介します。▼
同じカテゴリの記事一覧
- 静定構造物と不静定構造物の違いと特徴
- 外力の仕事について
- 最小仕事の定理とは?意味・カスチリアーノの第2定理との関係と不静定梁への適用
- 仮想仕事の原理とは|不静定梁・不静定トラスへの適用方法を解説
- 仮想仕事とは?1分でわかる意味、たわみ、構造力学、仮想仕事の原理との関係
- 不静定連続梁の解法|仮想仕事の原理を使った計算手順をわかりやすく解説
- CMQの算定
- たわみ角法[1/3]
- 固定モーメント法-その1-
- 固定モーメント法-その2-
- 不静定梁を固定モーメント法で解く方法|手順と計算例をわかりやすく解説
- 材端力と部材力とは?定義・記号の違いと剛性方程式への応用(マトリックス解析)
- マトリクス変位法(トラス):剛性マトリクスの組み立てと解法
- マトリクス変位法(トラス)【2/3】
- HOME > 構造力学の応用 > マトリクス変位法(トラス)【3/3】
- 1級の過去問(計算)解説
- わかる建築構造の用語集・図解集
- 1頁10円!PDF版の学習記事
